在 人中找她,那个人灯光模糊。 我们花费了数千亿美元,用近百年的时间寻求构筑智能机器的神秘,但是不知道它已经存在于数理逻辑、计算机科学中,这个神秘就是自指( Self-reference )。 在20世纪初计算机科学诞生的时代,罗素、盖德尔、图灵、克林尼、奎恩等人已经将许多自我指导的技术引入数学和基础逻辑,证明了许多定理。 但冯·诺依曼的敏锐洞察力超过了所有这些人。 他还指出,现实生命能够自我增殖的不仅仅是自我指向的机器,自我指向+热力学也是创造达尔文生物进化的原始动力。 因此冯·诺依曼所说的复杂性阈值就是这个自指,系统要实现自指,在自指动力学的指导下不断挖掘概率论中的漏洞,不实现可能完成自复制、进化和演化的自指,它必然在热力学的作用下逐渐降低和退化。 如何实现自我进化的自我指标机器? 这可能是引起下一次AI革命的核心问题。
人中找她,那个人灯光模糊。 我们花费了数千亿美元,用近百年的时间寻求构筑智能机器的神秘,但是不知道它已经存在于数理逻辑、计算机科学中,这个神秘就是自指( Self-reference )。 在20世纪初计算机科学诞生的时代,罗素、盖德尔、图灵、克林尼、奎恩等人已经将许多自我指导的技术引入数学和基础逻辑,证明了许多定理。 但冯·诺依曼的敏锐洞察力超过了所有这些人。 他还指出,现实生命能够自我增殖的不仅仅是自我指向的机器,自我指向+热力学也是创造达尔文生物进化的原始动力。 因此冯·诺依曼所说的复杂性阈值就是这个自指,系统要实现自指,在自指动力学的指导下不断挖掘概率论中的漏洞,不实现可能完成自复制、进化和演化的自指,它必然在热力学的作用下逐渐降低和退化。 如何实现自我进化的自我指标机器? 这可能是引起下一次AI革命的核心问题。
冯·诺依曼的手稿《自我复制机器人理论》由人工智能的先驱者Arthur Burks总结成书。 集智俱乐部的老球迷“东方和尚”把全书的第一部分翻译成中文,张江作了详细的评价。 我们将其总结成《冯·诺依曼自动机械理论》系列的文章,希望读者能够做到这一点。 本文共六个线圈(下半部分)。
全书大纲:
人工智能摆掷骰子的方法——三种概率理论
数道——大脑与电脑的比较
复杂度阈值与概率论中的“脆弱性”
自己指向机器的神秘
在翻译过程中进行了以下添加和修改:
1、为了方便阅读,在原文上划分段落标题
2 .为了让读者感到亲切,加入了一些插图。
3、对原文增加了很多评论,东方和尚的评论和张江老师的评论都会显示出来。 另外,因为这本书是冯·诺依曼的助手Arthur W. Burks (遗传算法之父约翰holland的博士课程的老师),框中的文字是编辑的评论。 大家要注意区别。
机器人的构建
阿瑟w.burks :
冯·诺依曼只简单地提到了他想要使用的原创的种类。 这些部件McCulloch-Pitts的神经模型相似。 一些零件“除了在两端之间建立刚性几何连接之外,没有其他功能”。另一个零件称为“运动组件”,起到“肌肉一样的作用”,受到刺激后长度缩小到零。另一个零件遇到脉冲时“建立或切断连接”他最多也是这样的零件 由这些零件构成的机器人可以自动捕捉偶然碰撞的零件。 “我们可以发明出能够识别被抓住的零件类型的装置”。
1948年6月,冯·诺伊曼在普林斯顿高等研究院( IAS )向朋友讲了三次关于机器人的课程,大概是为了准备9月份的希克森会议。 据我所知,这几堂课包括了冯·诺依曼对自我复制机器人的最详细的分析。 因此,编辑尽量从听过的笔记和参加者的记忆中收集部件及其功能的相关细节,叙述如下。
冯·诺伊曼描述了八种不同的部件,用直线来表示它们,并且表示位于中心或两端的输入和输出端子。 机器人在离散的时间里工作,每个零件必须在一个单位的时间里反应。 我们不知道这个由八种部件组成的列表是否完成了冯·诺依曼的意图,但编辑推测他对这个问题还没有得出结论。
有四个部件处理逻辑和信息。 由于“应力部件”( Stimulus organ )接收和发送刺激信号,因此接收这些信号是分离的。 换句话说,此部件的真实函数相当于“p或q”。 集成部件( Coincidence organ )提供了一个名为p和q的布尔函数。 隐含零件( inhibitory organ )提供p和非q布尔函数。 刺激信号发生器用作刺激信号源。 第五个零件是刚性零件( rigid member ),它是刚性组件,用作机器人实体的结构骨架。 刚性部件不受任何刺激,与信号绝缘。 刚性零件可以与其他刚性零件组合使用,也可以用于架设其他零件。 另一个是在受到刺激时“焊接”两个部件的连接部件。 编者认为,假设某个构造上的a点和其他构造上的b点被焊接,则在连接部件上运动的输出端子同时与a和b接触,在t时向连接部件发送刺激信号,在t+1时a和b这2点被焊接。 然后,通过连接部件可以离开现场。 另外,也有切断零件( cutting organ ),受到刺激时,切断零件会切断连接。
第八个零件称为“肌肉零件”( muscle ),可用于生成运动。 肌肉部件一般具有刚性,可与其他部件连接。 t时肌肉部位受到刺激时,t+1时会收缩到零长度,维持上面所有的连接。 除非刺激信号消失,否则肌肉部件仍然收缩。 编辑者认为肌肉部件1具有例如将某个结构上的a点和另一个结构上的b点连接在一起,肌肉部件2还具有将a点和一个连接部件的输出端子c连接在一起的功能。 并且,肌肉1和2被刺激时,收缩,收集a、b、c这3点,连接部件被刺激,a和b点被焊接。 最后,肌肉上的刺激消失后,恢复原来的长度,肌肉1上的至少一个端子也与a、b点分离。 最初的肌肉和其他部件的连接是如何实现的,以后是如何切断的,冯·诺伊曼似乎没有提及。
 在机器零件池中漂浮
在机器零件池中漂浮
摘自Gene Pool人工生命软件
根据冯·诺依曼的构想,机器人使母亲的机器人漂浮在某个平面上,周围是无限的零件海。 父机器人在存储器中包含制造子机器人的记述。 根据说明,把必要的零件捡起来安装在正确的位置。 为了实现这个,主机器人必须包括能够抓住零件进行识别的装置。 在1948年6月的课程中,冯·诺伊曼只是略微提到了这个问题,两个激励部件就像触角一样从主机器人延伸出来,碰到其他部件时,可以通过激励一个信号来测试所遇到的部件的性质,激励部件可以发出信号,但是结构部件不能发出的肌肉部件
冯·诺依曼在他的第一次设计尝试中忽略了能源和能源问题。 他之后打算考虑这个问题,比如把电池作为新的基本部件采用。 此外,冯·诺依曼的这个初始自复制模型处理了包括运动、接触、定位、连接和断开的几何动力学问题,但没有考虑真正的机械和化学意义上的能量和力问题。 因此,在本书第二部分中,该模型被称为自复制动力学模型( kinetic model ),介绍了冯·诺依曼之后提出的自复制小区模型( cellular model ),读者可以对两者进行比较。
在1948年6月的课程中,冯·诺依曼提出了动力学自复制模型是否需要三维空间的问题。 他怀疑这个模型只能在三维空间和黎曼曲面(多连接的多个平面)中实现。 然而,在本说明书的第二部分中,二维平面能够实现自复制小区模型。 这似乎表明二维平面也能够实现动力学自复制。
回到伊利诺伊的讲座:冯·诺伊曼探讨了自我复制机器人的一般设计方法。 他说如果理论上有足够的时间和原材料的话,什么样的机器都可以制造出复印的工厂。 这个工厂有具备以下能力的机器b。 对于任何结构或机器x,机器b自动扫描x,以表示x上的所有部件和这些部件的相互连接方法,得到x的完整说明。 根据以上说明,机器b同样可以复制x。 “这和自我复制非常接近。 因为你可以给自己b,得到自己的复制品。”
但是,能够实现比较简单且最终目的的不是直接制作能够复制任意结构或样本的机器人,而是制作能够基于逻辑描述来组装目标的机器人。 这是因为,复制某个对象,以任何想象的方法必须分为两个阶段,首先从具体的对象抽象地说明,然后再说明具体的对象。 因此,先做下一步很容易。
为了实现这一点,我们首先必须有机器人的公理性描述。 正如我们所见,我的做法与图灵的通用机器人非常相似,从理想的机器通用记述开始。 正如我之前所说的,我们一共有大约十几种基本部件,只要把那些细节具体地写下来(我想两张纸就够了),我们就能得到描绘机器人的无模糊形式的语言。 现在,您可以将这些格式的符号转换为二进制符号,并将其记录在冲压带上。 因此,任何机器人的记述都可以记录在打孔纸带上。 请不要说明机器人的各部件和这些部件之间的连接方法。不要直接说明这个机器人是怎样一步一步地组装起来的,后者更方便。
阿瑟w.burks :
冯·诺依曼接着介绍了将刚体部件转换为二进制穿孔带的过程。 请参见下图。 每个基本链的交点可以用二进制字符编码。 1表示零件连接到相应的位置,而不是0。 如果读写该数字串,则对应位置的部件也会相应地被修正。
因为我有纯粹的数学习惯,所以喜欢用最简单的符号来表示一切,这里的表示可能有点过于简化。 我现在使用的是二进制表现,在上面的图中,没有考虑分歧点的问题,或者每个位置只能连接一个零件。 当前的描述语言和符号系统使用了比二进制更多的符号,但是这里只需要二进制符号就足够了,我们可以毫无困难地表示更多的符号,可以分别显示和连接分支。 事实上,不一定需要使用线性符号系统。 我们也可以用复杂的包含环的环构造来表现机器人,但是那时非线性的代码会失效。 我们看起来简单的序列码的喜好,虽然不是有理由怀疑只是来自语言的习惯的序列码,但是高效率的机器人记述存在的可能性很高。 因为我们对这种组合不直观。
自复制机器人的核心
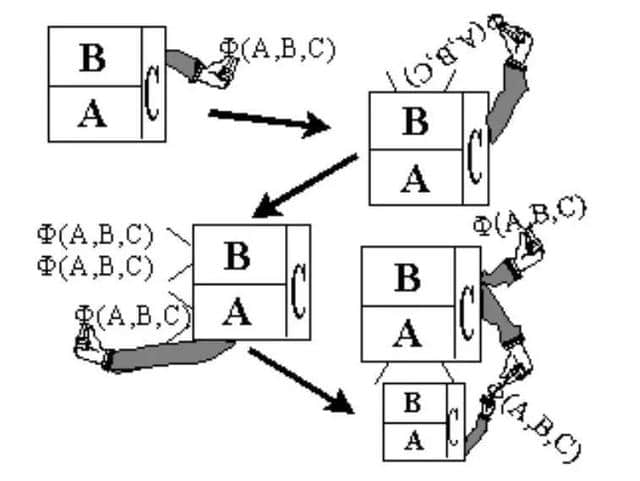 冯·诺依曼自我复制机器人模型的形象展示(译者加)
冯·诺依曼自我复制机器人模型的形象展示(译者加)
影像来源: http://informatics.Indiana.edu/Rocha/ss 504 _5. html
由于给出完整的公理性记述体系并不困难,我们可以用二进制代码表示任意设想的机器人。 可以用上图中的一系列部件来表示这种描述。 将机器人x的代码串设为φ(x )。 然后,可以设计“通用构造函数”( Universal constructer)A。 给φ(x )时,利用周围浮起的零件,可以一点一点地组合x。 实际的设计工作当然很麻烦,但从理论上来说是不行的。 这个过程可以归纳为形式逻辑的阶段性推论,因此在性质上和共同的图灵机器没有区别。
还有一点想说的是,就像我之前说的那样,制造任何机器人都能直接复制的机器人是很复杂的。 所以,优选不是从复印的设备的实体,而是从复印的设备的记述中复印。 但是,想补充一下,某个复制机械能够直接复制直线的刚体零件链是很简单的事情。 实体拷贝变得困难的真正原因是,实体机器人的构造和我们的串行思考习惯完全不同,各种各样的零件连接着各个方向。 只把扫描的零件从列表中排除出来很麻烦。 但是,复制长链并不难。 因此,假设有通用复印机B(copy automaton ),在b中输入说明时,b会制作相同的两个说明。
完成以上两步后,可能会产生错觉,这个过程中复杂性衰退的原理似乎还没有被打破。 从表面上看,在复印的过程中,似乎没有产生更微妙的东西和更多的联系。 a只能按照说明制造x。 根据对复杂性的一般认识,x的复杂性等于x的描述。 另一方面,b拷贝获得了两个φ(x ),但是并排有两个相同的φ(x ),所以没有作为整体的复杂度比一个复杂度高的理由。 此外,为了完成复印,需要额外的机器b。 但事实并非如此。
现在,您可以: 机器a和b组合,可在A+B中追加控制器c。 c首先命令b复制两个φ(x )的描述,控制a和b,然后命令a用φ(x )实际制造x,并且删除其中的φ(x )的副本一部分。最后,c将x和剩馀的φ(x )汇总起来并从机器A+B+C的组合中分离出来,从而使x +φ( x )
根据以上的原理,如果使用( A+B+C )代替x并进行与上述同样的操作,则( a+b+c)+φ(a+b+c )的机器人的组合能够形成动机的组合( a+b+c)+φ(a+b+c )。 因此,实现了机器人的自我复制!
阿瑟w.burks :
这个过程的详细情况如下:
1 .现有机器人( A+B+C )附带其说明φ(a+b+c )。
2、( A+B+C)+Φ (A+B+C )开始复印流程。
3、c控制b复印的描述,以获得( A+B+C)+Φ (A+B+C)+Φ (A+B+C )。
4、c命令a用φ(A+B+C ) )实际制造a+b+c
得到( a + b + c ) + ( a + b + c ) +φ( a + b + c ) +φ( a + b + c )。
5、最后的c总结了新得到的机器人A+B+C及其记述φ(a+b+c ),将自己和新机器人分开,得到2个( A+B+C)+Φ (A+B+C )的复制完成。
这个过程不是循环论:首先明确定义了a和b。 在提及x之前,说明了c适用于任何形式的机器人x。 然后定义变量x。 这是描述c如何做的,让我们联系这个变量x和c吧。 因此,a、b、c的定义完全独立于x。 然后,将该x称为a、b、c。 因此,并非整个过程都是循环的。
以上的通用构造函数( generalconstructiveautomotion ) a具有某种意义上的创造性,也就是说,a能够从抽象的描述中“制作”实体机器。 同样,通用复印机b也有将一份记述改为两份的“创造力”。 但是,a和b都没有自我复制能力,另外,控制器c也没有任何形式的创造和复制能力。 唯一能做的就是刺激其他两个组件做某事,把某事连接起来,把某事从原系统中分离出来。 但是,a,b,c组合起来,它们作为整体可以复制自己。 因此,可以将一个自动复制系统分割成不同的部分,每个部分不能复制自己,但是整个自动复制机器需要很多。
自复制机器人的演化
另一个是x代表A+B+C+D,其中d代表任意机器人。 ( A+B+C)+Φ (A+B+C+D )可以创建( A+B+C+D)+Φ (A+B+C+D )。 也就是说,我们的自我复制功能不仅有自己的能力,还有生产其他组件d的能力。 这是自我复制生命所具备的功能,在自我复制时产生副产品。
作为一个系统,( A+B+C+D )可以发生类似的变异。 在定义“自我复制”是什么意思的时候,我们会遇到结晶的成长就像复制自己一样的构造。 但是,我们认为把结晶称为自我复制显然是不名实的。 避免这种困难的一种方法是将发生变异的能力和制造类似但与母体不同的生命的能力包含在“自我复制”的定义中。
现在考虑称为( A+B+C+D)+Φ (A+B+C+D )的机器人。 “变异”是指中间部件随机变化。 如果a、b或c部件发生变化,系统通常会失去自我复制能力。 例如,在c的部件被修改之后,c很可能在正确的时间不能向a和b发送刺激信号或者在需要时不能进行连接和断开,这种变异是致命的。
但是如果变异发生在描述Φ (A+B+C+D )上,则该系统不是自己,而是创建改变了的自己,下一代机器人是否继续复制它取决于变异发生的具体位置。 a,b,或者c变化的话,子孙机器人就会变成“绝后”。 但是,变异发生在d的记述中时,除了d变成了d’,变异的子代和母体系统完全一样。 后代继承这种变异d’。 这是遗传变异的基本过程。
也就是说,该系统虽然还原始,但具有遗传变异的基本特性。 大多数随机变异是致命的,但偶尔也可能发生非致命或遗传变异。 这是遗传特有的性质,该系统也同样具备。
杰克评估:
1、自指——永恒的金带
自我是一个非常古老的话题,它与古代的奥秘和神秘哲学有关。 例如佛教中提倡的“无常观、无常观、无我观”和古希腊的“了解自己”,都推荐心灵的观察箭头对准自己。 中国道家提倡的“无”,是最简单的语言悖论。
 自食之蛇
自食之蛇
最能表达自己手指深意的画,吞噬着自己的蛇。 这条蛇作为图腾广泛出现在北欧神话、基督教神学、印度教、非洲宗教中。 这条蛇意味着深深的自我毁灭——可以想象一旦吞噬了自己会发生什么样的奇怪情景。
将这种自我毁灭性的古代奥秘应用于现代科学已经得出了一系列深刻的结论。 首先,在19世纪末,着名数学家康托尔( George Cantor )将“对角线删除”法则应用于集合论,证明了实数多于自然数。 然后罗素提倡着名的“罗素悖论”,破坏了弗雷格的数学大楼。 年仅25岁的盖德尔巧妙地应用了数学系统的梦想,用同样破坏性的自我指向破坏了数学达人希尔伯特的完全一贯性。 图灵( Alan Turing )使用同样的技术,发现了任何超级计算机都无法解决的图灵停机问题。
纽约时报将哥德尔的不完全定理评价为20世纪最伟大的数学定理。 自己的手指可以用来构筑破坏性悖论已经是众所周知的,是理所当然的事情。 但是,这种认识其实是单方面的。 自我指示包含着比自我指示悖论更广泛的内容。 因为在自己指定的大家庭中,也包括其他种类的构筑性的成员。
1953年,当人们举杯祝贺沃森和克里发现DNA的双螺旋结构,在分子层面解释生命自我复制之谜时,另一位伟大的美国匈牙利系数学家约翰·冯·诺伊曼( John von Neumann )独立思考生命自我复制的逻辑基础。 但遗憾的是,当时冯·诺伊曼患了癌症,于1957年2月去世。 因此,助手Arthur Burks将关于自复制机器人理论的整理归纳为“theoryofself-reproducing automata”,并于1966年出版。
与沃森·克里克不同的是,冯·诺伊曼寻找的不是物质基础而是生命自我复制的逻辑基础。 冯·诺依曼虽然没有明确指出,但已经暗示了这个自我复制的逻辑基础不是另一回事,而是自我指向结构。 也就是说,自我是生命实现自我复制的逻辑核心。 这可能使读者困惑不解。 其实还存在另一种类型的自我指纹,这可能意味着构建革命性武器,比如盖德尔定理或罗素悖论。 笔者称之为“建构性的自指”。 不仅不会造成破坏,还能创造惊人的结构。 关于自我增殖的系统是多么意外,请参考第4节的讨论。
事实上,1938年与盖德尔一起建立了递归函数论基础的数学家克林尼证实了递归函数论中着名的定理即递归定理(更准确地说,应该称为Kleene第二递归定理)。 据此,人们能够简单地得到数学推论,系统的自我复制是可能的。 证明递归定理的核心技术是被称为“奎恩( kuai3)恩”的特殊技术。 蒯恩( Willard.V. Quine )是美国哲学家,致力于终身哲学、数学逻辑、集合论的研究。 他为了不使用“我”和“这个词”等语言就能创造出能够说自己的句子,创造了一种叫做蒯恩的方法。
有趣的是,蒯恩结构正是其“黄金对角线”(该方法当时提出了康托首先证明实数多于自然数的方法,格德尔定理也是构建格德尔文的重要技术)。 但是,康托尔、盖德尔等人的对角线和蒯恩的对角线的方法有些不同。 这些技术将在第6段中详细讨论。
总之,从宗教到科学,从悖论到自我复制,自我是指一贯的主题。 正如《哥德尔,埃舍尔,巴赫》一书所指出的那样,自己是指永恒的金带。
 画家、埃舍尔和荷兰着名版画艺术家
画家、埃舍尔和荷兰着名版画艺术家
照片来源:《魔镜——埃舍尔不可能的世界》
2、蒯恩计划
因此,所有矛头都指向这个不可思议的复杂性阈值。 那到底是多少? 冯·诺依曼死前并没有计算复杂性,但他运用数学家和哲学家敏锐的头脑强调,这个复杂性阈值与数学、逻辑学和哲学上的重要概念“自我指数”有关。
冯·诺依曼在本章最后讨论的自我复制机器人的抽象描述,其实是哲学家们称之为“蒯恩”的程序。 蒯恩( Willard.V. Quine )是美国哲学家,他创造了一种叫做蒯恩的方法。 人们可以不用“我”或“这个词”之类的语言来创造能够说自己的句子。 例如,下一个词是不使用“这个词”的自指悖论
将“中的第一个单词放在左引号之前,其馀单词放在右引号之后,引号和其中的单词不变的句子是假”的第一个单词放在左引号之前,其馀单词放在右引号之后,保留引号和其中的单词不变的句子是假的
按照这个词的指示把引号中的文字放在引号的后面,可以得到自我否定的句子,所以上面的词和下面的词等价
这句话不对。
之后,数学家Kleene将蒯恩这一语言性操作数学化,得到了更普遍的Kleene递归定理。 有了这个递归定理,数学家就可以在严格的数学公理体系中玩各种各样的自指游戏了。 之后,盖德尔利用这一技术构建了公理系统知名的盖德尔文“本命题无法证明”,并发表了被盖德尔定理这一纽约时代杂志选定的20世纪最伟大的数学定理。
那么,这个兰恩程序到底是什么呢?实际上,它是一个非常容易理解的程序,它可以打印自己的源代码。
s ( x ) { q =’s ( x ) { nqq =’+ q +’; n print (’+ p ( q ) + ); n }’print (‘s ( x ) { nqq =’+ q +’; n print (’+ p ( q ) + ); n ); }其中n表示换行符,print(‘anb”运行时,程序将输出以下字符串
a.a
乙组联赛
" + "表示将两个字符串连接起来形成新的字符串,例如a =’123’、b =’456’、a + b =’123456’。
该自打印程序调用简单的解密函数p(q ),p起到将字符串q转换成更浅等级的字符串的作用。 例如,若q为“n”,则p的函数计算输出“n”。 也就是说,p将“”映射到“”、“将“”映射到“”,然后完成将“n”映射到滑架返回的一系列映射。 很明显,p是可以写的。 如果使用java和VB实现了这个程序,那么执行它就可以自我复制。
让我们分析一下这个过程是如何工作的。 首先,让我们看看程序的最后一行
print (‘s ( x ) { NQ =’+ q +’; n print (’+ p ( q ) + ); n ); 该词旨在程序在屏幕上打印字符串。 注意,该打印的字符串实际上被“+”符号分割成5个部分,第一部分是“S(x){nq=”,第二部分是保持字符串q的副本,第三部分是字符串“; n print (’),第4部分是函数p作用于q的结果p(q ); 第5部分为字符串: '; 中所述情节,对概念设计中的量体体积进行分析。 并且,将q字符串的数值代入第二部分和第四部分,进行运算p时,得到与源程序相同的结果。 在计算机上运行此程序可以看到您的源代码将在屏幕上裸体打印。
让我们总结这个程序的五个部分,创建一个由以下三个部分组成的副本。 泵。 Control,其中Copy是第五个部分,相当于复制字符串的程序,如果在Copy中输入了多少字符串,则Copy会直接读出该字符串,Popup是原始五个部分中的第四个部分,即函数p,它是弹出操作,即输入 如果输入的字符串是第n层虚拟世界,则Popup用作将字符串跳转到第n-1层的角色。最后,Control这一部分对应于原始的第1、3、5三个部分和第一个语句Print的总和,并为Copy和Popup创建的字符添加适当的连接词 此打印(‘s ( x ) { nqq =’+ q +’) n print (’+ p ( q ) + ); n ); 可以改写成“复印件”。 泵。 控制( q )。 “其中”。 表示将不同的程序连接成一体。
如果将计算机程序x的记述(或源代码)写成φ(x ),则印刷程序的最初的代入语句相当于对q赋予φ。 泵。 控制,即复制。 泵。 控制)这三个程序连接的源代码。 最后,自我打印程序可以缩短如下:
S(x){q=Φ (Copy )。 泵。 控制( copy )。 泵。 Control) (q )那么,看这个程序,实际上就是冯诺依曼所说的自我复制程序: ( A+B+C)+Φ (A+B+C )。 这里,Copy相当于电话噪声程序的复印功能b,能够直接印刷被交付给它的数据的Popup相当于电话噪声说明的通用构造函数,能够基于数据印刷与数据对应的自动机的源代码(与此相对应) Control这个部分对应于c。 q=Φ (Copy )。 泵。 控制对应于Φ (A+B+C )。 因此,我们实际上可以很容易地在我们的电脑上实现自我复制的计算机程序。
你可能会提出一个疑问,即使是这个项目也没有实现真正的自我复制。 由于此程序必须调用字符串处理程序,如函数p和字符串运算符“+”,因此这些功能必须在更高级别的编译器中运行,而不是在程序本身中运行。 所以,这个兰恩程序实际上和平凡的自我复制程序(例如包含平凡的高级句子的“Copy me”)没有什么区别,平凡的自我复制程序给予了自我复制环境过高的能力,但是自我复制程序本身只起着触发器的作用。 另一方面,对于艾恩程序来说,翻译艾恩程序的环境变得比较简单,但是实现自我复制的代码承担更大的责任。 原则上,我们不能完全依赖环境,不能擅自制造实现自我复制的机器。 但是,我们总是能够降低对环境的要求,降低编译器的复杂性,突出复制程序的能力。
由此可知,在不同的情况下,编译环境和在该环境中实现的程序显示了连续的复杂度的变化。 自我复制过程实际上是环境复杂性和过程本身复杂性的权衡。 环境的复杂性越高(编译环境能够支持复杂的指令集),实现能够打印自己的源代码或复制自己的程序就越容易(降低程序本身的复杂性)。 相反,环境的复杂性越低,实现自我复制的过程就越困难。 你可以得到下图
如果根据运行所有程序的编译环境及其本身的复杂度列出这样的连续空间,则不同编译环境中的自复制程序基本上是线性的,如图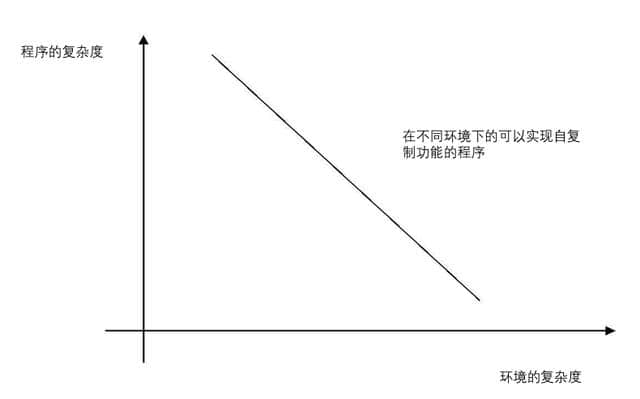 所示。 随着环境的复杂性的增加,实现自我复制的程序的制作也变得越来越容易,所以我们确实知道这是单调减少的曲线。 因此,可以推测该自复制过程满足的复杂性方程式
所示。 随着环境的复杂性的增加,实现自我复制的程序的制作也变得越来越容易,所以我们确实知道这是单调减少的曲线。 因此,可以推测该自复制过程满足的复杂性方程式
上述公式表示用于实现自复制程序复杂度的允许条件,等号成立时,与图中向下的直线对应。 不等式对应于直线右上角的半平面。 该公式使人联想到第2章所述的不确定性原理。 因此,对自复制程序的复杂性的讨论可能确实存在量子理论这样的不确定性原理。 从这种不同层面考虑程序复杂性的概念,可能真的蕴藏着我们所不知道的真理。
也就是说,复印机器人真正抓住了常说的“出现”这一重要概念的本质。 这是因为如果从单一的构成要素来看,无论是通用的构造函数a、复印机b还是控制器c,这些数据Φ (A+B+C )都不具有自复制功能,因此如果将它们适当地组合起来,则可以进行自复制,能够实现自复制功能的出现。 与讨论其他出现机制的不同之处在于,自复制机器人具有相应的数学对应物:递归定理,从数学上理解出现的话,自复制机器人是不可避免的。 遗憾的是,冯·诺依曼的最终梦想,从热力学和信息论的角度来理解自我复制机器人的自发出现还没有实现。
关于蒯恩、递归定理及自指的讨论,是本人撰写的科学论文《系统中的观察者(5)―自指―图案与基板连接的金属带》http://wiki.swarma.net/index.PHP / % E7 % B3 % bb % E7 % bb % 9f % E4 % b8 % ad % E7 % 9a % 84 % E8 % a7 % 82 % E5 % af % 9f % E8 % 80 % 85 (5) % E2 % 80 % 94 % E2 % 80 % 94 % E8 % aa % E6 % 8c % 87 (或点击阅读原文) 侯世达:“盖德尔,埃舍尔,巴赫”,商业印刷馆,1996; r.m.smullyan :诊断和参考,Oxford University Press,1994。
 集智QQ群|292641157
集智QQ群|292641157
商业合作| zhangqian@swarma.org
投稿转载| wangting@swarma.org
◆公共编号检索:集智俱乐部
进入“无墙研究所”
让我们把苹果撞得更厉害!